為中國工業健康發展貢獻力量!翁開爾集團成立將近100年,為中國客戶提供多種檢測儀器以及化工原材料。






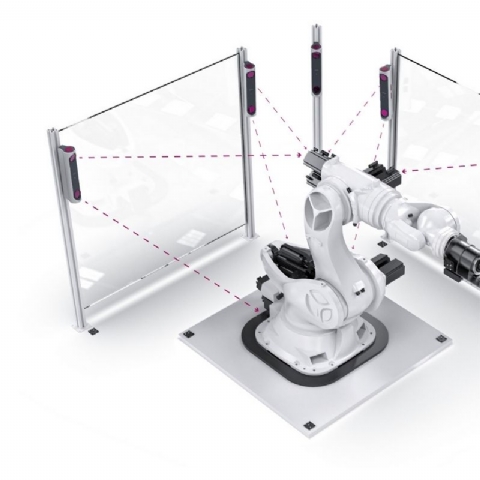
英國INSPHERE公司研發的IONA機器人軌跡實時監控係統可以實時糾正零件位置變化,監控機器人的軌跡。
英國INSPHERE公司研發的IONA機器人軌跡實時監控係統實時提供位置數據使機器人模擬和程序能定期或實時更新,高效糾正零件位置變化、單元設置或自動化係統的固有誤差。提供的數據使製造係統有了一個精確的數字孿生體, 使用戶能夠將離線程序無縫上線,無需人工幹預。生成的計量級數據可用於提高機器人的精度和性能,使新工藝得以自動化。適配所有機器人品牌,如 KUKA,或者ABB, FANUC。
通常機器人依賴於它們的可重複性而不是準確性。當機器人第一次移動到編程位置時,它隻能到達+/- 2mm以內。但是,它將始終返回到相同的位置,在+/-0.05mm以內。因此,這種準確性的缺乏往往會導致手動調試過程的發生。當程序首次上線時,工程師將使用站在機器人旁邊的示教器手動調整每個關鍵程序位置,以糾正不準確之處。這顯然是一個昂貴且耗時的過程,會延遲新產品投入生產的速度。它還可能浪費在係統校正之前“試運行”所需的多個部件。這個過程也是主觀的,車間的工程師決定什麼是可接受的,這也在移交給流程所有者時帶來了挑戰。
IONA機器人軌跡實時監控係統係統解決方案:允許操作員執行程序的物理試運行,使用傳感器捕獲數據,然後使用ORA軟件突出顯示預期程序與現實中發生的情況之間的差異。這減少了引入新程序更改的調試時間。在引入新的零件或模型變型時,這可以節省大量時間。也可以更頻繁地引入 程序更改或新部件。這也為程序更改創建了一個可追溯的過程,並創建了一個驗證機器人程序的獨立方式。當機器人在生產中出現故障時,在高通量係統中,計劃外停機每分鍾的成本可能超過10000英鎊。作為機械係統,機器人也會受到磨損,其位置精度會隨著時間的推移而“漂移”。這可能導致工藝超出可接受的公差限製,在某些情況下,不得不報廢零件。諸如此類的問題可能是由機器人本身引起的,但也可能與與機器人相關的夾具或零件不同有關。在流程中“發現”的問題越晚,由於附加值,成本影響就越大。在最壞的情況下,產品因故障而交付給客戶,在產品召回的情況下可能損失數百萬美元。

IONA機器人軌跡實時監控係統係統解決方案:監控機器人末端執行器或TCP相對於夾具或工件的位置。通過不斷跟蹤一段時間內的運動,可以建立行為模式。如果由於機器人問題或夾具導致過程開始“漂移”,這將顯示為與正常行為不同,並標記可能發生問題。然後,可以使用此見解來預測並計劃較佳維護間隔的時間。
數字孿生
驗證製造係統的數字版本並全天候 24/7 監控性能,從而能夠識別趨勢並敏捷地做出反應。知道數字模型與真實環境準確匹配並且可以準確實施任何更改,可以對數字模擬更有信心。在不手動幹預的情況下進行這些更改會增加係統正常運行時間和生產力,創造一個真正柔性製造係統。
預測性維護
通過持續監控機器人末端執行器相對於夾具或工件的位置,IONA機器人軌跡實時監控係統允許工程人員獲得前瞻性見解,以預測何時需要維護。
快速、自動化調試
快速執行程序的物理試運行,使用IONA機器人軌跡實時監控係統毫不費力地捕獲數據,然後使用 ORA 軟件突出預期程序與現實和過程中發生的事情之間的差異。然後可以通過單擊按鈕來更改以更正程序。
物聯網連接
標準化的通信協議允許與生態係統中的其他設備輕鬆交換數據,以創建能夠在物理世界中執行複雜任務的真正自主的網絡。

| 尺寸 | 118 毫米 x 176 毫米 x 605 毫米 |
| 重量 | 6.5公斤 |
| 輸入功率 | 24V,2.5A(直流或 POE) |
| 功耗 | 60W |
| 有效視野 | 58.7°x 58.1° |
| 工作溫度 | -10° 至 +40° |
| 機器人支持 | KUKA, ABB, FANUC(注:其他品牌可以根據需要添加) |
| 通訊支持 | OPC-UA & MQTT |
| 準確度 | 210µm(注:1σ 由修改後的 VDI/VDE 2634-3 測試確定,該測試在工作空間中進行,身體對角線為 2.6m,有 6 個節點) |
| 工作量 | 無限,隨著額外的節點增加 |
 熱門關注
熱門關注 熱門關注
熱門關注